
Dört ÖZETİ| ayaklı hayvanlar özellikle arazi şartlarında bir adım öne geçiyor. Son birkaç yılda robot üreticileri bu hareketleri dört ayaklı robotlarda da etkili bir şekilde kullanmaya çalışıyor. Robotlarla ilgili son bir hamlede de Tencent Robotics X firmasından geldi.
Tencent Robotics X'in yeni robot modellemesi ne üzerine kuruldu?Dört ayaklı robotlarda çevik hareketi sağlamak için umut verici gelişmeler sağlanıyor. Ancak, bu modeller genellikle simüle edilmiş ortamlarda deneniyor. Gerçek robotlar üzerinde, gerçek dünya ortamlarında uygulandıklarında performansları bazen düşüş gösterebiliyor.
Çevik dört ayaklı hareketi gerçekleştirmeye yönelik yeni bir adım attı. Şirket hareket sensörleri ve kameralar tarafından toplanan hareketli hayvan görüntülerini kullanarak yeni bir model üzerinde çalışmalara başladı. İmitasyon öğrenme olarak adlandırılan bu yaklaşım, bazı dört ayaklı robotlarda hayvan benzeri hareketlerin yeniden üretilmesini mümkün hale getiriyor.

Neler çıktı neler! Çin'in 700 yıllık hazinesini robot buldu
Çinli arkeologların kullandığı robot tarafından keşfedilen antik gemi enkazı içerisinde 10 binden fazla eserin olduğu hazine bulundu.
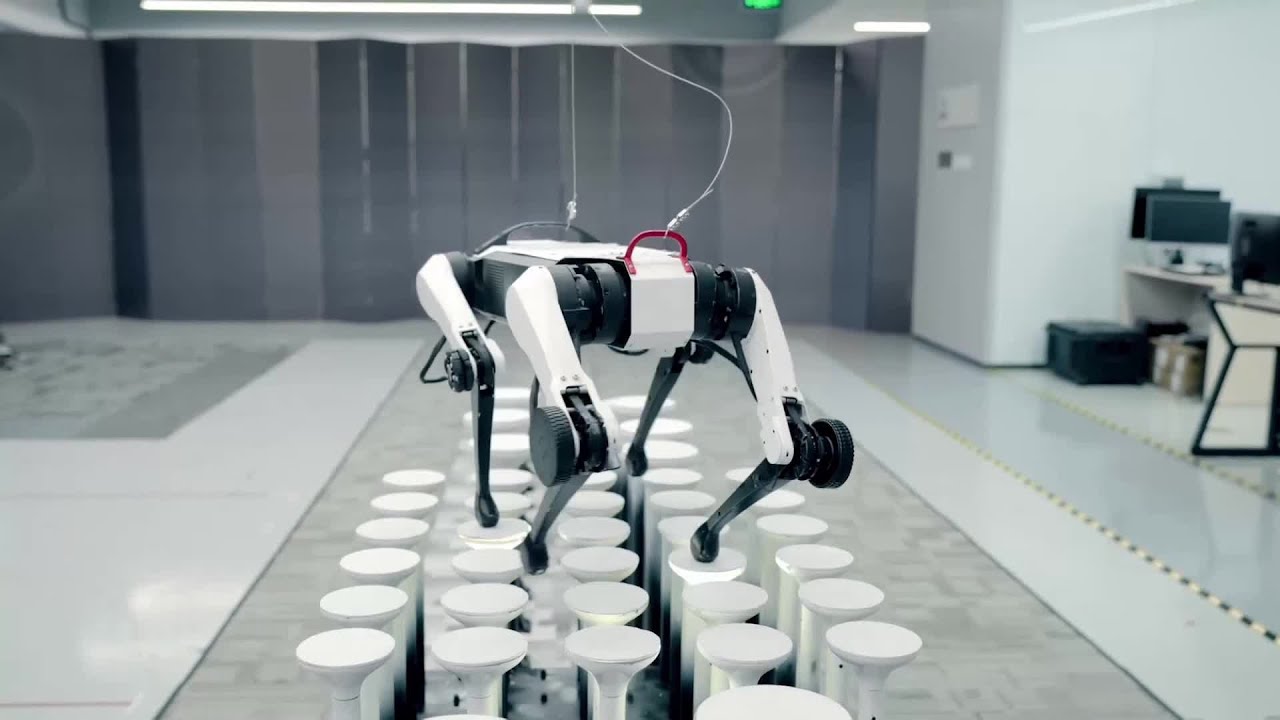
Çin'deki Tencent Robotics X araştırmacıları, dört ayaklı robotlarda hayvan benzeri çevik hareketlerin gerçekleştirilmesini kolaylaştırabilecek yeni bir modellemeyi tanıttı. Nature Machine Intelligence dergisinde yayınlanan bir makalede tanıtılan bu çerçeve, başlangıçta MAX adlı dört ayaklı bir robota uygulandı ve son derece umut verici sonuçlar alındı.
Araştırmacıların sunduğu yeni modellemede her biri farklı bir hareket görevi ve robot algılama düzeyinde bilgi çıkarımına odaklanan üç aşamalı öğrenme süreci ele alınacak. Hayvan hareketi verileri kullanılarak elde edilen bilgiler robotlara aktarılacak. Böylece robotların gerçek hayvanlar gibi hareket etmesi sağlanacak. Tencent Robotics X ilk olarak bu testleri ‘’MAX’’ adındaki dört ayaklı bir robota uyguladılar.
Veri aktarımı sonrasında ‘’MAXX’’ hayvanları taklit ediyor, karmaşık engelleri aşıyor ve kovalamaca oyunlarında başarı elde edebiliyor. Şirket ilk testlerde, modelin başarılı olsa da henüz farklı ortamlarda nasıl davranacağını bilmediklerini aktardı. Gelecekte, model diğer dört ayaklı robotlara adapte edilebilir. Böylece gerçek dünya ortamlarında kullanılmaları kolay olabilir.
Editor : Şerif SENCER




































